|
 |
Базисом на плоскости называются два любых неколлинеарных вектора этой плоскости, взятые в определенном порядке.
Пусть  и
и  – некоторый базис и
– некоторый базис и  – произвольный вектор, тогда по теореме 11.9 и следствию 11.1 существуют два единственным образом определенных числа
– произвольный вектор, тогда по теореме 11.9 и следствию 11.1 существуют два единственным образом определенных числа
 |
Числа  в данном базисе. В этом случае также пишут
в данном базисе. В этом случае также пишут 
Справедливы следующие свойства.

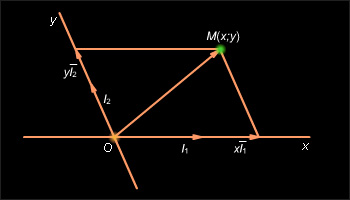
Пусть на плоскости заданы точка  Совокупность этого базиса и точки
Совокупность этого базиса и точки  Точка
Точка  и
и  то полученные прямые называются осями координат: прямая
то полученные прямые называются осями координат: прямая
|
| Рисунок 11.3.1 |
Если  и
и  взаимно перпендикулярны и их модули равны единице, то базис называется ортонормированным, и мы получим известную нам прямоугольную декартову систему координат на плоскости. Таким образом, рассмотренная здесь декартова система координат
взаимно перпендикулярны и их модули равны единице, то базис называется ортонормированным, и мы получим известную нам прямоугольную декартову систему координат на плоскости. Таким образом, рассмотренная здесь декартова система координат  является обобщением рассмотренной ранее прямоугольной декартовой системы координат, которая в свою очередь является частным случаем общей декартовой системы координат.
является обобщением рассмотренной ранее прямоугольной декартовой системы координат, которая в свою очередь является частным случаем общей декартовой системы координат.
Мы видели (теорема 11.12), что свойства сложения и умножения вектора на число, записанные через координаты вектора, в произвольном базисе сохраняются. Рассмотрим, как изменится выражение для скалярного произведения, записанное через их координаты в произвольном базисе. Итак, пусть  – произвольный базис,
– произвольный базис,  и
и  – любые два вектора. Рассмотрим скалярное произведение этих векторов и преобразуем его, используя ранее доказанные свойства:
– любые два вектора. Рассмотрим скалярное произведение этих векторов и преобразуем его, используя ранее доказанные свойства:
   |
Таким образом, для вычисления скалярного произведения двух векторов в произвольном базисе, кроме их координат, надо знать модули базисных векторов и угол между ними. Очевидно, что если базис ортонормирован, то 
 и мы получим известную формулу для скалярного произведения в ортогональной декартовой системе координат.
и мы получим известную формулу для скалярного произведения в ортогональной декартовой системе координат.
Выбор той или иной системы координат ничем не ограничен и определяется в каждом конкретном случае только соображениями удобства (см., например, доказательство теоремы 11.10). Часто одно и то же множество приходится рассматривать в разных координатах. Одна и та же точка в различных системах имеет, очевидно, различные координаты. Множество точек (в частности, прямая, окружность) в разных системах координат задается различными уравнениями. Выясним, как преобразуются координаты точек плоскости при переходе от одной координатной системы к другой. Ограничимся случаем ортогональных систем.
Пусть на плоскости заданы две прямоугольные системы координат:  и
и  (см. рис. 11.3.2).
(см. рис. 11.3.2).

|
| Рисунок 11.3.2 |
Первую систему с началом в точке  и
и  назовем старой, вторую, с началом в точке
назовем старой, вторую, с началом в точке  и
и  – новой. Положение новой системы относительно старой будем считать известным: пусть точка
– новой. Положение новой системы относительно старой будем считать известным: пусть точка  а вектор
а вектор  образует с вектором
образует с вектором  угол α, который отсчитывается в направлении против движения часовой стрелки от направления, задаваемого вектором
угол α, который отсчитывается в направлении против движения часовой стрелки от направления, задаваемого вектором 
Рассмотрим произвольную точку
 |
 и
и  по базису
по базису  а вектор
а вектор  – по базису
– по базису 
   |
 |
 и
и  можно разложить по старым базисным векторам
можно разложить по старым базисным векторам  следующим образом:
следующим образом:
 |
 и
и  в формулу, получим векторное равенство
в формулу, получим векторное равенство
 |
 |
Если меняется только начало координат, а направления осей остаются прежними, то, полагая в формулах
 |
Если начало координат остается прежним, а оси поворачиваются на угол α, то, полагая в формулах
 |
|
|
 |


 – базис и
– базис и 
 – два произвольных вектора. Очевидно,
– два произвольных вектора. Очевидно,