Учебник. Движение
Преобразование фигуры, которое сохраняет расстояние между точками, называется движением этой фигуры.
Свойства движения.
Движение – взаимно однозначное преобразование.
Пусть X и Y – две разные точки, образы которых при преобразовании движения f совпадают, т. е. f (X) = f (Y). По определению ρ (f (X), f (Y)) = ρ (X, Y). С одной стороны, ρ (X, Y) ≠ 0, так как по условию X ≠ Y. С другой стороны, ρ (f (X), f (Y)) = 0 в силу предположения. Полученное противоречие доказывает теорему.
Преобразование, обратное к движению, – движение.
Пусть f – заданное движение, – обратное к нему преобразование, а и – две точки плоскости, являющиеся образами точек X и Y. По определению обратного преобразования при этом и Следовательно, – движение. Теорема доказана.
Три точки, лежащие на одной прямой, при движении переходят в три точки, лежащие на одной прямой, и сохраняется порядок их взаимного расположения. Три точки, не лежащие на одной прямой, переходят в три точки, не лежащие на одной прямой.
Пусть движение переводит три точки A, B, C, лежащие на одной прямой, в точки
соответственно, и для определенности положим, что точка B лежит между точками A и C. Тогда выполняются равенства
Предположим, что найдутся три точки A, B, C, не лежащие на одной прямой, такие, что их образы при движении f лежат на некоторой прямой. Рассмотрим преобразование По теореме 12.2 – движение, и в соответствии с доказанным в первой части теоремы образы точек лежащих на одной прямой, также лежат на одной прямой. Но а они по предположению не лежат на одной прямой. Полученное противоречие доказывает теорему.
- Отрезок движением переводится в отрезок.
- Луч при движении переходит в луч, прямая – в прямую.
- Треугольник движением переводится в треугольник.
- Пусть концам отрезка AB движение f сопоставляет точки и Возьмем любую точку X отрезка AB. Тогда по теореме 12.3 лежит на прямой между точками и то есть на отрезке Наоборот, любую точку отрезка преобразование преобразует в точку Y, принадлежащую отрезку AB, так как – также движение. Теорема доказана.
- Пусть A и B – произвольные точки данной прямой, – прямая, проведенная через образы точек A и B при движении f. Рассмотрим произвольную точку C прямой AB. По теореме 12.3 точки где лежат на одной прямой, т.е. прямой Аналогично в силу того, что – движение, для точки прямой существует точка D прямой AB такая, что Поскольку при движении взаимное расположение точек сохраняется, то луч переходит в луч при преобразовании движения.
- По теореме 12.3 три точки A, B, C, не лежащие на одной прямой, переходят при преобразовании движения в точки соответственно, не лежащие на одной прямой. Кроме того, отрезки AB, BC и AC переходят в отрезки Таким образом, треугольник ABC переходит в треугольник Причем по определению движения Тогда по третьему признаку равенства треугольников треугольники ABC и равны.
При движении сохраняются углы.
Рассмотрим три точки A, B, C, не лежащие на одной прямой. Они задают лучи AB и AC, являющиеся сторонами угла BAC. Пусть – соответственно образы рассматриваемых точек A, B, C. Докажем, что Согласно доказательству предыдущей теоремы треугольник ABC равен треугольнику а из равенства треугольников следует, что Теорема доказана.
Две фигуры называются равными, если они движением переводятся одна в другую.
Пусть у двух движений f и g фигуры F образы некоторых трех точек A, B, C, не лежащих на одной прямой, совпадают, т.е. f (A) = g (A) = A1, f (B) = g (B) = B1, f (C) = g (C) = C1. Тогда движения f и g совпадают.
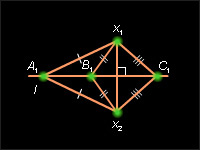
Возьмем любую точку X ∈ F. Пусть X1 = f (X) и X2 = g (X). Покажем, что X1 и X2 совпадают. Допустим, что X1 и X2 – различные точки. Так как f и g – движения, то X1A1 = XA и X2A1 = XA. Поэтому A1X2 = A2X2, т.е. точка A1 равноудалена от точек X1 и X2. Следовательно, точка A1 лежит на серединном перпендикуляре отрезка X1X2 – прямой l (см. рис. 12.2.1).
Но точно также можно сказать, что и точки B1 и C1 лежат на одной прямой l. Мы получим, что точки A1, B1, C1 лежат на одной прямой l. Это противоречит теореме 12.3. Итак, и совпадают, и в силу произвольности выбора X движения f и g совпадают.
Пусть на плоскости заданы два равных в смысле определения главы 4 треугольника ABC и Тогда существует такое движение плоскости, которое переводит точку A в A1, точку B в B1 и точку C в C1.
Введем векторы
В силу равенства треугольников ABC и
имеем равенства
А также: библиотека ЭОРов и образовательный онлайн-сервис с тысячами интерактивных работ "Облако знаний".